Карасев Г.Н. канд. техн. наук, профессор кафедры «Дорожно-строительные машины»Московского Автомобильно-Дорожного Института (Государственного Технического Университета), МАДИ (ГТУ),
(Загрузить статью файлом в полном формате с иллюстрациями) Автогрейдер является дорожно-строительной машиной, предназначенной для профилирования и отделки земляного полотна дороги. Кроме того, его применяют для планировки насыпей, выемок и их откосов, формирования и очистки кюветов и каналов, перемешивания грунта или гравия с вяжущим материалами. Автогрейдеры широко используют при летнем содержании и ремонте грунтовых и гравийных дорог, а в зимнее время - для расчистки дорог и аэродромов от снега.
Рабочий орган автогрейдера - отвал - размещен внутри колесной базы машины между передней и задними осями (рис. 3). Такое размещение отвала в сочетании с балансирной подвеской задних колес существенно уменьшает вертикальное перемещение режущей кромки отвала при преодолении колесами неровностей, благодаря чему повышаются планирующие качества автогрейдера и уменьшается число необходимых проходов по одному месту.
Число проходов автогрейдера по одному месту (n) при выполнении планировочных работ определяет его производительность, зависит от параметров конструкции автогрейдера и характеристики неровностей планируемого земляного полотна. Однако до сих пор нет рекомендаций на определение n, которое в настоящее время назначается на основании данных, полученных из сферы эксплуатации автогрейдеров, что препятствует оценке производственного потенциала их конструкции в заданных условиях эксплуатации.
Рассмотрим основные положения теории планирующих машин грейдерного типа [2]. Характер неровностей, на которые воздействует планировщик, представим как эргодический, стационарный процесс с нормальным законом распределения, а планировщик как нелинейную динамическую систему, которую можно линеанизировать статистическими методами и представить как линейную динамическую систему.
Уравнение рабочего процесса двухосного планировщика.
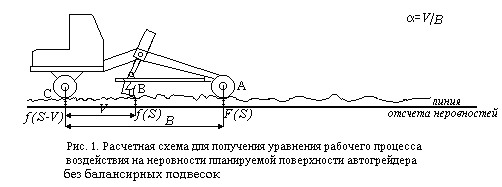
Для вывода уравнения рабочего процесса планировщика грейдерного типа используем расчетную схему, представленную на рисунке 1.
Где S – абсцисса кромки рабочего органа;
B – длина базы планировщика;
V – расстояние от кромки рабочего органа до задней оси;
F(S) – ордината профиля неспланированной поверхности под передней осью машины, она отнесена к абсциссе кромки рабочего органа;
f(S) – ордината кромки рабочего органа;
f(S-V) – ордината профиля под задней осью;
F,S - внешние воздействия, рассматриваются как случайные величины.
Допущения:
1. Внешние воздействия от образования колеи под передней и задней осями не учитываются.
2. Динамические деформации конструкции не учитываются только воздействия неровностей F(S).
3. Принимается, что неровности с длиной волны менее радиуса колеса подавляются ими и не учитываются.
4. Задняя ось движется только по профилю, очерченному кромкой рабочего органа, так как при планировании присутствует процесс опорной срезки неровностей.
5. Исключено из рассмотрения смещение отвала из опорной плоскости колес (условие прямолинейностиABC).
Составим уравнение рабочего процесса планировщика с учетом прямолинейности линии ABC (рис.1), которое получается при соблюдении следующих положений:
1. При наезде переднего колеса на неровность F(S) режущая кромка рабочего органа сместится по вертикали на величину
f`(S)= F(S)×V/B .
2. В то же время при наезде заднего колеса планировщика на неровность с абсциссой (S-V), полученную после прохода рабочего органа планировщика, режущая кромка рабочего органа сместится по вертикали на величину
f``(S)= f(S-V) ×(B-V)/B.
3. В результате ордината положения режущей кромки рабочего органа планировщика определится суммой
f(S)=f`(S)+f``(S).
Обозначив отношение V/B символом a, получим уравнение рабочего процесса планировщика в следующем вид
. (1)
Это уравнение дает описание воздействия неровностей неспланированной поверхности на рабочий орган планировщика. Представим это уравнение в рекуррентном виде, когда один из членов уравнения рабочего процесса определяется последующим уравнением.
f(S) = a×F(S) + (1-a)×f(S-V) (1-a)0
f(S-V) = a×F(S-V) + (1-a)×f(S-2V) (1-a)1
f(S-2V) = a×F(S-2V) + (1-a)×f(S-3V) (1-a)2
.......................................................................................
f(S-nV)= a×F(S-nV) + (1-a)×f(S-(n+1)V) (1-a)n
Помножим каждую строку этих уравнений на (1-a)n, где n - номер строки, и просуммируем все строки.
f(S) +(1-a)×f(S-V) +(1-a)2 ×f(S-2V) +(1-a)3 ×f(S-3V) + ... +(1-a)n×f(S-nV) =
= a×F(S)+(1-a)×f(S-V)+a×(1-a)×F(S-V)+(1-a)2 ×f(S-2V)+a×(1-a)2×F(S-2V) + +(1-a)3 ×f(S-3V) + ...+ +a×(1-a)n×F(S-nV)+...+(1-a)n×f(S-nV)+ ...
В результате получим
. (2)
Для использования полученного уравнения (2) рабочего процесса планировщика необходимо иметь закон изменения неровностей F(S) неспланированной поверхности, который представим в виде гармонического профиля
,
где А - амплитуда неровностей; L - длина периода гармонического профиля.
Тогда уравнение рабочего процесса планировщика примет вид
,
которое, используя формулу косинуса разности углов, можно представить в виде
.
Дальнейшие преобразования с использованием формул тригонометрических рядов [1] позволили получить уравнение рабочего процесса двухосного планировщика в следующем виде
, (3)
где
,
. (4)
Согласно определений теории преобразования гармонических процессов дробное выражение перед тригонометрической функцией косинуса называют амплитудно частотной характеристикой (AZX) средства преобразования (в нашем случае планировщика) гармонических процессов.
В результате получено уравнение рабочего процесса двухосного длиннобазового планировщика с рабочим органом, расположенным внутри базы, которое представляет собой произведение амплитудно частотной характеристики (AZX) и уравнения, описывающего входное воздействие планируемого профиля с учетом сдвига по фазе j максимума амплитуды (А), определяемого параметрами планировщика (V, a) и планируемого профиля (L).
|