Лобов Н.В., Мальцев Д.В., Генсон Е.М. Пермский национальный исследовательский политехнический университет
Мусоровозы имеют разные коэффициенты уплотнения и, следовательно, при одинаковых объемах кузовов, могут перевозить разную массу мусора. На данный момент, предприятия, занимающиеся сбором и транспортировкой твердых бытовых отходов (ТБО), взимают плату с жилищно-коммунальных хозяйств города пропорционально количеству баков (объему вывозимого мусора), из-за отсутствия технической возможности определения массы отходов в местах их сбора. Решению данной проблемы и посвящена настоящая статья.
Ранее проведенный анализ способов определения массы перевозимых ТБО, позволил выбрать наиболее оптимальный способ фиксации параметра. Идея заключается в определении веса мусора, находящегося в баке, по величине давления рабочей жидкости в гидросистеме мусоровоза во время подъема бака.
Для проведения эксперимента был выбран мусоровоз МК-20, с боковой загрузкой ТБО, произведенный на базе шасси КАМАЗ 53215, с вместимостью кузова не более 24 м3 и допустимой массой вывозимых отходов, не более 6725 кг. Фиксация основного параметра, давления в гидросистеме, осуществлялась при помощи датчика PT 9551 с диапазоном измерений от 0 до 25 МПа. Мусоровоз был оборудован системой мониторинга подвижных и стационарных объектов FORT 300. Навигационный терминал FORT 300 применяется для: дистанционного контроля и передачи данных состояния объекта, сбора телеметрической информации и передачи ее пользователю.
Индуктивный датчик давления PT 9551 был установлен в напорную магистраль, между насосом Н и гидрораспределителем Р (рис. 1), это позволило получать данные о давлении в каждом гидроцилиндре и фиксировать процессы не только подъема баков, но и прессования ТБО, а также подъема кузова для разгрузки мусоровоза на полигонах.
На рис. 1 представлена гидросхема мусоровоза МК-20.
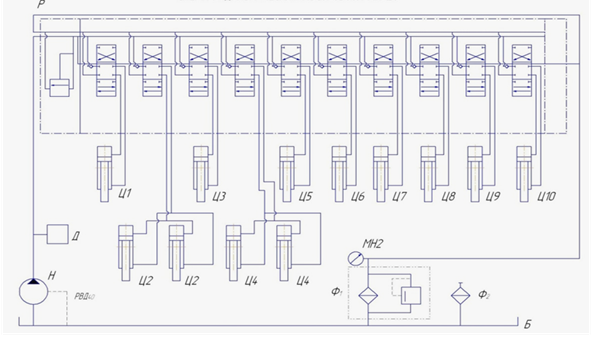
Рис. 1 Гидросхема мусоровоза МК-20
Д - датчик; Н - насос; Ф1,Ф2 - фильтры; Р - гидрораспределитель; МН2 - манометр; Б - бак масляный; Ц1 - гидроцилиндр ворошителя; Ц2 - гидроцилиндр заднего борта; Ц3 - гидроцилиндр крышки; Ц4 - гидроцилиндр подъема кузова; Ц5 - гидроцилиндр толкающей плиты; Ц6 - гидроцилиндр захвата; Ц7 - гидроцилиндр поворота захвата; Ц8 - гидроцилиндр поворота манипулятора; Ц9 - гидроцилиндр наклона стрелы; Ц10 - гидроцилиндр излома стрелы.
Порядок работы гидравлического оборудования мусоровоза в режиме загрузки ТБО следующий: после включения коробки отбора мощности, начинает работать насос. При нейтральном положении рычагов управления гидрораспределителя давление в гидросистеме отсутствует, т.к. напорная линия соединяется со сливной и масло от насоса сливается в бак. При управлении гидроприводом исполнительных механизмов мусоровоза, путем перемещения рычагов, золотники гидрораспределителя переходят в крайнее положение, и рабочая жидкость под давлением поступает к гидроцилиндрам. Следует отметить, что чем большим нагрузкам подвергается гидроцилиндр, тем выше будет давление в гидросистеме. Все гидроцилиндры мусоровоза являются силовыми гидроцилиндрами двустороннего действия с односторонним штоком.
Датчик установлен под кузовом, в средней части автомобиля. Он защищен от механических повреждений специально изготовленным стальным кожухом. На рис. 2 показано место установки датчика.
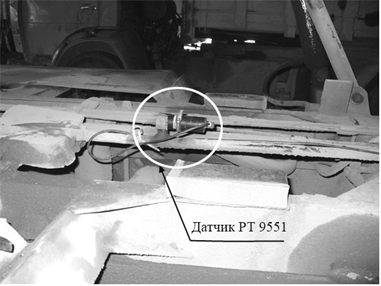
Рис. 2. Место установки датчика
Навигатор FORT 300, получив сигнал от датчика, при помощи мобильного интернета, через определенные интервалы времени (15…20 с), отправляет данные на сервер. Диспетчер, подключившись к серверу, может отслеживать сигнал в режиме реального времени.
Эксперимент был проведен во время очередного рейса мусоровоза, при этом фиксировалось время погрузки, количество баков и показания датчика. Во время эксперимента было загружено 7 баков. Необходимо отметить, что все баки были полностью заполнены. На рис. 3 представлен график зависимости показаний датчика от времени загрузки ТБО. Для удобства график условно разделен на интервалы. Интервалы с №1 по № 7 соответствуют загрузке ТБО, а интервал "А" соответствует циклу неполного прессования.
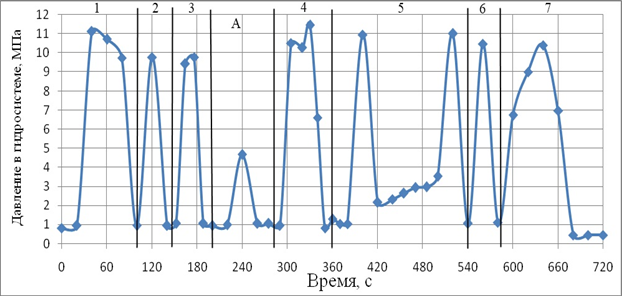
Рис. 3. Загрузка 7 баков ТБО во время проведения эксперимента
На каждом интервале можно выделить пик, т.к. во время работы гидроцилиндров давление в системе (следовательно, и показания датчика) резко увеличивается. Необходимо отметить, что при прессовании давление в системе значительно ниже, чем при загрузке ТБО, т.е. в дальнейшем режимы прессования могут быть легко идентифицированы.
Экспериментально установлено, что время загрузки мусора составляет от 20 с до 120 с, а иногда и более. Таким образом, при передаче данных на сервер с интервалом 15…20 с, можно получить всего одно значение, как, например, на участке №2, которое, скорее всего не будет являться пиковым.
Поэтому параллельно производились замеры с временными интервалами 2 с, 4 с и 6 с, с целью выбора наиболее оптимального режима работы навигатора FORT-300. Замеры производились в кабине мусоровоза МК-20, данные считывались непосредственно с навигатора при помощи ноутбука. На рис. 4 приведено сравнение данных, полученных при загрузке одно и того же бака, но с разным интервалом измерений.
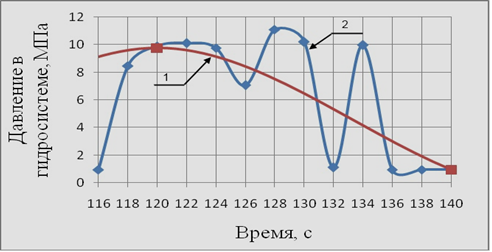
Рис. 4. Сравнение показаний датчика, полученных через 2с и 20с
(1 - интервал измерений 20 с. 2 - интервал измерений 2 с)
Давление в гидросистеме 9,9 МПа, которое было отправлено на сервер, также было зафиксировано при получении данных непосредственно с навигатора. Как и предполагалось, данная точка не является пиком, следовательно, по ней невозможно правильно определить вес бака с мусором. Наибольшее значение давления в гидросистеме, зафиксированное при погрузке этого бака, 11,11 МПа. Падение давления во время загрузки мусора можно объяснить тем, что датчик установлен в напорную магистраль, а при неподвижном манипуляторе, давление в напорной магистрали падает, т.к. жидкость идет на слив. Разумеется, при этом давление жидкости в гидроцилиндре сохраняется, оно "заперто" там гидрораспределителем.
Также замеры производились с временными интервалами передачи данных 4 с и 6 с. В результате было установлено, что этого также недостаточно для определения пиковых нагрузок.
В следующей серии экспериментов была поставлена задача, выяснить, как изменяется давление в гидросистеме мусоровоза в зависимости от веса бака. Были использованы: стандартный мусорный бак объёмом 0,75 м3 , весы складские с диапазоном измерений от 25 до 500 кг, эталонные гири для нагружения. По результатам экспериментов (рис. 5) можно сделать следующий вывод: рабочее давление в гидросистеме - пульсирующее, но можно увидеть, что максимальное значение давления соответствует максимальному весу в баке.
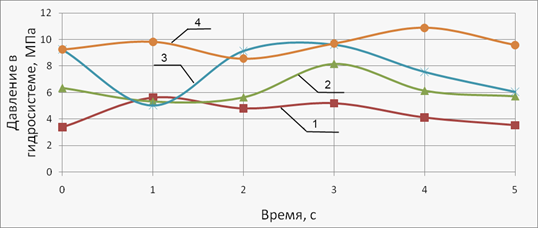
Рис. 5. Изменение давления в гидросистеме, в зависимости от веса отходов в баке (1 - 90 кг; 2 - 150 кг; 3 - 250 кг; 4 - 300 кг)
Выводы:
1) Место установки датчика выбрано верно, т.к. показания датчика позволяют фиксировать одновременно несколько важных процессов во время работы мусоровоза: загрузку мусора, прессование, подъем кузова;
2) Экспериментально подтверждено, что при загрузке ТБО, максимальное давление в напорной магистрали мусоровоза соответствует максимальной загруженности мусорного бака;
3) Установлено, что при работе навигатора в обычном режиме (передача данных каждые 15…20 с), определение веса мусора невозможно, необходимо снижать временной интервал передачи данных;
4) Установлено, что рабочее давление в гидросистеме изменяется пропорционально поднимаемому весу, при этом наблюдался значительный разброс фиксируемых значений, т.к. процессы, происходящие в гидросистеме, являются динамическими.
Направление дальнейших исследований связано с анализом процессов, происходящих в гидросистеме и разработкой алгоритма фильтрации данных.
|